ロボットの生活浸透にみる、これからの人とロボットの共生
目覚ましい発展を遂げるロボット技術によって、ビルの警備や掃除、ファミリーレストランの配膳など、私たちの生活でも身近になってきたロボット。
これらのロボットがさらに人間の仕事や生活に溶け込み、人と“共生”していく社会に向けて、今必要となる技術はどのようなものか—-。
当社で取り組む研究や実証の内容とともにご紹介します。

岡田 敦 株式会社電通総研
Xイノベーション本部 ビジネスインキュベーションセンター
通信会社にて大容量メディアの伝送の研究に従事した後、電通総研(当時 ISID)のオープンイノベーションラボに参画。宅配ロボットを遠隔支援してオフィスへのコーヒを届ける実証実験、家具や植栽・モノが自動で動いて景観を変える技術、VRにより 幻肢痛の遠隔セラピーを実現する研究開発などを手掛ける
1.ロボット活用の現状
近年、工場などで働く「産業用ロボット」だけでなく、ビルのエントランスで警備をするロボットやファミリーレストランで注文した商品を持ってくるロボットなどいわゆる「サービスロボット」の活用が盛んになっています。2024年3月にUberがロボットを使った配達サービスを開始する※1など、ロボットはさらに私たちの身近になるでしょう。
サービスロボットが普及することは、労働力不足や人手不足の解消に繋がります。例えばロボットは故障がない限り予定通りに作業を進められるため、人間が働くのに過酷な環境、例えば真夏・真冬の屋外の作業や、早朝や真夜中といった働きづらい時間帯の業務において特に効果を発揮します。また、あるものを運ぶのに1日何往復もする、という単調・反復的な作業や、人間が持てない重さのものを移動させるといった作業をロボットに任せることできれば、人の負担軽減・業務効率の向上に繋がり、人間は人間にしかできない作業に集中できるようになります。工場やプラントなど危険な現場での作業や災害対応をロボットが代行できれば人の安全を確保できるかもしれません。このようにロボットが日常の生活や業務に浸透すれば、人間は多くの恩恵を受けることができます。
2.ロボット普及に関する課題
しかしながら、こういったロボットの普及には課題が多いのも事実です。
例えば、清掃ロボットと警備ロボットが同じビルの中で一緒に業務をこなしている様子も見られるようになりました。しかし、現状ではロボット毎、またはロボットメーカー毎に動作の指示をする必要があり、いわば、ロボットによって言語や流儀が異なるのです。
ロボット同士が互いのタスクを理解せずに衝突したり、障害物になり進めないなど、課題が生じます。
今後ロボットの普及が進む中で、複数のサービスロボットを同時に動作させ多様なサービスを提供したい場合には、どのような対応が必要になるか3章で解説します。
また、ロボットのさらなる活用を促すためには、私たちが日ごろから活用しているアプリケーションと連動させることや、普段からITを利用していないユーザーにもより簡単に活用できる方法を検討する必要があります。このような課題を解消するための実証実験を4章でご紹介します。
3.課題解決策①:ロボットプラットフォーム
規格の異なる複数のロボットが、同一空間において動作するには、異なるロボットを一元的に制御・管制し、単独のシステムで作業指示する・状態を管制する仕組みが必要です。これらを可能にするのがロボットプラットフォームです。ロボットプラットフォームとは利用者の指示をそれぞれのロボットがわかる内容に変換する、いわば翻訳者のような動きをします。利用者はロボットのメーカの違いを意識せずに、動かしたいロボットにやってほしい内容を指示することができます。
また、各ロボットの位置や移動中かどうかなどを管理し、ロボット同士が衝突しそうになったら道を譲り合うように制御するなど、トラブルを未然に防止することができます。
3-1. 電通総研が開発するロボットプラットフォームのPoC
電通総研でもロボットプラットフォームのPoCを実施し、検証を進めています。このプラットフォームを利用することで、ロボットメーカーの違いを吸収し、Webブラウザやスマートフォンのシステムから一元的にロボットを制御することが可能になります。
電通総研が開発するロボットプラットフォームには次のような特徴があります。
・統一したインタフェースを提供。WEB画面でロボットの選択・移動場所を指示可能
・ロボット事に異なる地図仕様を吸収し、各ロボットにあった座標に変換
・ロボットの移動先登録機能
このプラットフォームを使って、複数のロボットへ指示を出し同時に動作させることができました。こちらを使ってお客様の案内をロボットにさせたり、ものを運ばせるといった作業が可能になりました。現時点では、限られたロボットを扱える状態ですが、今後は多様なロボットを制御できるように改良を続けていきます。
3-2. ロボットプラットフォームとスケジュール管理アプリケーションを連携させた実験
次に、自社で開発したロボットプラットフォームと、外部アプリケーションやIoTシステムを連携させて制御する仕組みを試みています。その連携事例として、電通総研が開発した「動く椅子」とスケジュール管理アプリケーションがあります(図1)。
動く椅子は、いわば自律走行する椅子です。ロボットプラットフォームから動く椅子に指示すると、動いて指定のフォーメーションに配置されます。例えば、セミナーという予定の場合は、正面に向かって横一直線にロボットが並ぶように自動でフォーメーションされる、ディスカッションをする場合は、それぞれの椅子が向かい合う形で配置されるなど、事前に組み込むことで会議室の利用形態に合わせた配置が、会議開始前に出来上がっている仕組みです。
実際に登録された予定の内容に合わせて自動でフォーメーションが変化するため、会議の主催者やイベント参加者が設備を移動させる手間がなくなるメリットがあります。
 図1:スケジュール管理アプリケーションを使用し、ロボットに動作指示を出す様子
図1:スケジュール管理アプリケーションを使用し、ロボットに動作指示を出す様子3-4. ロボットプラットフォームとIoTを連携させた実証実験
別の外部連携事例として、人の屋内位置情報システムとロボットプラットフォームが連携することで、人がいる場所にロボットがものを運ぶといったサービスも実装しました(図2)。
屋内位置情報システムとして、Panasonic社のPOSITUSというサービスと連携しています。POSITUSのビーコンを持つ人の位置をシステムが検知し、その座標に合わせてロボットを向かう仕組みです。IoTでセンシングした情報に基づき、ロボットプラットフォームを介して指示が出せるようになれば、複数ロボットをIoTセンサーのもとで稼働できるようになります。これにより、例えば荷物をロボットで届けたいときに、誰に届けるかだけをシステムに指定すれば、システムが自動で届けてくれます。
例えば会社の中で荷物を受け取ったりする際に便利になります。さらに位置情報と連動することで、オフィスやホテルなどにおいてロボットが自分の後についてきながら荷物を運んでくれる、人がいないところだけ清掃してくれるなど、さまざまなシナリオでロボットを賢く運用することができます。
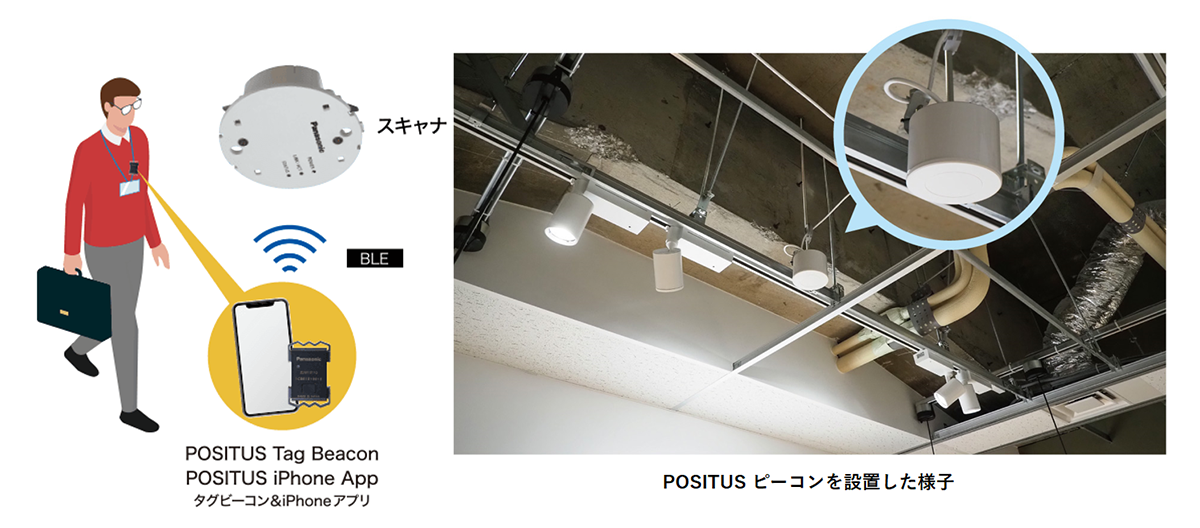 図2 POSITUS ビーコン使用のイメージ
図2 POSITUS ビーコン使用のイメージロボットプラットフォームとスケジュールシステムや屋内位置情報システムの実装事例についてご紹介しました。今回の事例の他にも、受付システムとロボットプラットフォームの連動により、来客に合わせてロボットがお客様を迎えに行き予定の場所に案内する、その案内先の机や椅子を自動配置しながらお客様を迎える、といったこともできるようになります。このようにさまざまなITサービスとロボットの制御を組み合わせることで、人が足りなくて対応ができないことやサービスの拡充にロボットが一役買ってくれる時代が近く到来するでしょう。
4.課題解決策②:ロボットを呼び出すインターフェース
生活や仕事の中で通常使用しているアプリケーションを使い、ロボットをより気軽に呼び出すことで、より人とロボットの円滑な共生が実現できると考えています。例えば、飲食店で店員さんを呼び出すようにテーブルのボタンを押す、SNSで話しかけるようにスマホでロボットを呼ぶ、もしくはチャットツールで直接話しかける、など、様々な方法が考えられるでしょう。
もしくは、手をあげるとロボットが来てくれる、そのような呼び出し方もあり得るかもしれません。これらについて実際に試した事例をご紹介します。
4-1. ロボットをスマホで目的に合わせて呼び出す実証実験
電通総研では、ロボットが走り回る建物の中でどのようにロボットを呼び出せばいいのか、自社オフィスでロボットを走らせながら検討を行っています。
まず、ブラウザやスマートフォンなど、グラフィカルなインターフェース上でロボットを操作した場合、どのような体験が得られるのか、呼び出しシステムを構築して実際に試してみました(図3-図5)。システムは、机の上に置かれたQRコードをスキャンするとサービスメニューが現れ、その中から希望のものを選択すると、目的にあったロボットがサービスを提供してくれるというものです。今回は「コーヒー」や「バッテリー(PCやスマホの充電器を希望するときに使用)」といったサービスを用意しました。選択したサービスに合うロボットが対応します。このシステムを応用して、来社いただいたお客様へのコーヒーデリバリーを行う仕組みも構築しています(図6)。
 図3:スマートフォンでロボットに指示を出す様子
図3:スマートフォンでロボットに指示を出す様子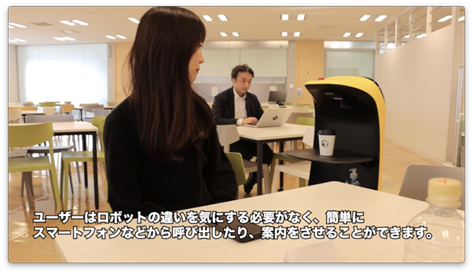 図4:スマホでコーヒーをリクエストするボタンを押すと、黄色いロボットがコーヒーを運んできてくれる(PUDU社のkettybotを利用)
図4:スマホでコーヒーをリクエストするボタンを押すと、黄色いロボットがコーヒーを運んできてくれる(PUDU社のkettybotを利用)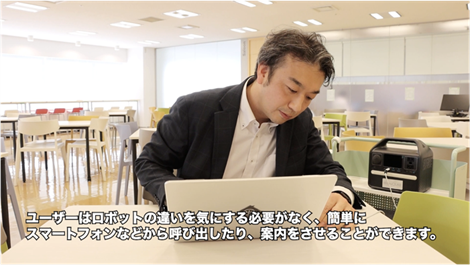 図5:充電が必要なシーンでバッテリーをオーダーすると、ロボットが充電器を持ってくるサービスも用意(keigan社のkeiganALIを利用)
図5:充電が必要なシーンでバッテリーをオーダーすると、ロボットが充電器を持ってくるサービスも用意(keigan社のkeiganALIを利用) 図6:システムの指示でロボットがお客様にコーヒーを運ぶ様子
図6:システムの指示でロボットがお客様にコーヒーを運ぶ様子4-2. 姿勢推定によるジェスチャーでロボットを呼び出す実証実験
IoT機器やセンサーの高度化により詳細に情報を解析できるようになれば、人の行動や挙動から人のことをより理解できるようになります。例えば、レストランなどで店員さんをテーブルに呼ぶときに私達は手を上げますが、同じように挙手によってロボットを呼び出す、というように、ボタンやスマートフォンの操作なしにロボットとやり取りする時代も考えられます。電通総研では、そのような時代に向けて準備すべく、人の姿勢推定に関する先端的技術とロボットプラットフォームを組み合わせて、ジェスチャーによるロボットの呼び出しを実現しています。この仕組みは、部屋に設置したカメラから画像を取得し、姿勢推定技術を用いて人が手を挙げたことを検知して、そのシグナルに基づいてロボットが対応するというものです(図7)。複数の人が空間にいる場合でも、挙手した人のもとにロボットが向かいます。このシステムの体験者は、ロボットを呼び出したあとで、あたかもロボットが自分の思いを汲み取ってくれたように感じたと言います。このように、人間が人間にするような自然なアクションにロボットが反応し、ロボットが自分のことを理解してくれている、という体験が実現できれば、社会により多くのロボットの導入が進むのではないかと考えられます。
 図7:ロボットを挙手で呼び出す様子
図7:ロボットを挙手で呼び出す様子さらに私たちは、職場でのプライバシー保護と集中力の維持を目的とした仕組みも検討しています。例えば、業務中に他の人の視線が気になる状況を何らかの方法で検知した際に、ロボット植栽が自動的に移動し、人と人との間に自然なバリアを形成します。
電通総研は今後、人とロボットの接点を近づける「ユーザーフレンドリー」の技術に着目しながら、ロボットが社会に自然に浸透することに貢献したいと考えています。
5.まとめ
電通総研は、ご紹介したように、ロボットが身近に使われるための価値や実際の利用方法について探求しています。ロボットをスマホやブラウザで操作したり、人の挙手に合わせて動かしたりとき、ロボットがより身近なものとして感じられました。将来、ロボットは人手不足の代替手段や危険な作業を肩代わりしてくれるという存在を超え、仕事や生活を支援してくれる欠かせない存在となっていく可能性を感じています。空間内に配置されたIoTセンサーやAIを使った行動分析によって得られた人に関する情報を、より賢く分析できるようになり、システムが人の意思や行動を理解できるようになれば、ロボットが人々のニーズに即応する、ロボットが先回りして行動している、というような世界も実現されるかもしれません。近年ではスマートビルと呼ばれる、ビルの設備や自体をインテリジェントに制御する仕組みも登場しています。ロボットの発展とあいまって、ロボットが動く環境がスマート化していくことで、人とロボットの共生が加速されると期待されます。電通総研は、ロボットとの共生社会の実現に向けて引き続き検討を進めてまいります。